
Categories


Latest Products





























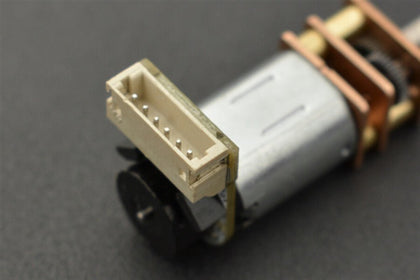
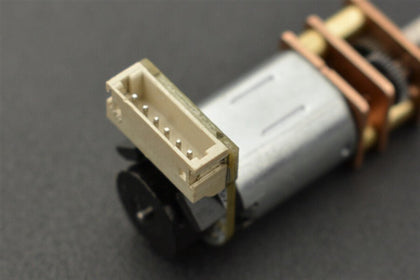
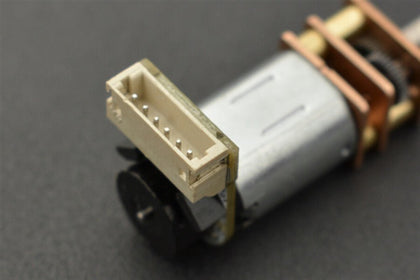
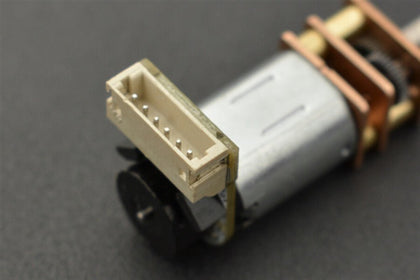
This is a TT Micro DC Geared Motor with Back Shaft working at 6V with 160rpm. The TT motor series the most popular DC motors for DIY enthusiasts. It is designed to easily incorporate the DFRobot Encoder. These motors are inexpensive, small, easy to install, and ideally suited for use in a mobile robot. The DFRobot ROMEO microcontroller is able to complete the closed-loop PID making use of the Gravity:TT Motor Encoders Kit.
We recommend this rubber wheel for this motor.
Specification
Electrical Characteristics:
Operating Voltage Range: 3~7.5V
Rated Voltage: 6V
Max. No-load Current(3V): 140 mA
Max. No-load Current(6V): 170 mA
No-load Speed(3V): 90 rpm
No-load Speed(6V): 160 rpm
Max. Output Torque: 0.8 kgf.cm
Max. Stall Current: 2.8 A
Operating Conditions:
Rated Load: 0.2 kgf.cm
Operating Temperature: -10~+60 ¡æ
Storage Temperature: -30~+85 ¡æ
Motor Type: 130
Mechanical Characteristics:
Output Mode: 2 sides
Gear Ratio: 1:120
Max. Diameter of Output Axle: 5.4 mm
Net Weight: 45 g
Shipping List
Micro DC Geared Motor with Back Shaft x1
This is a TT Micro DC Geared Motor with Back Shaft working at 6V with 160rpm. The TT motor series the most popular DC motors for DIY enthusiasts. It is designed to easily incorporate the DFRobot Encoder. These motors are inexpensive, small, easy to install, and ideally suited for use in a mobile robot. The DFRobot ROMEO microcontroller is able to complete the closed-loop PID making use of the Gravity:TT Motor Encoders Kit.
We recommend this rubber wheel for this motor.
Specification
Electrical Characteristics:
Operating Voltage Range: 3~7.5V
Rated Voltage: 6V
Max. No-load Current(3V): 140 mA
Max. No-load Current(6V): 170 mA
No-load Speed(3V): 90 rpm
No-load Speed(6V): 160 rpm
Max. Output Torque: 0.8 kgf.cm
Max. Stall Current: 2.8 A
Operating Conditions:
Rated Load: 0.2 kgf.cm
Operating Temperature: -10~+60 ¡æ
Storage Temperature: -30~+85 ¡æ
Motor Type: 130
Mechanical Characteristics:
Output Mode: 2 sides
Gear Ratio: 1:120
Max. Diameter of Output Axle: 5.4 mm
Net Weight: 45 g
Shipping List
Micro DC Geared Motor with Back Shaft x1
RETURNS POLICY
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Morbi ut blandit risus. Donec mollis nec tellus et rutrum. Orci varius natoque penatibus et magnis dis parturient montes, nascetur ridiculus mus. Ut consequat quam a purus faucibus scelerisque. Mauris ac dui ante. Pellentesque congue porttitor tempus. Donec sodales dapibus urna sed dictum. Duis congue posuere libero, a aliquam est porta quis.
Donec ullamcorper magna enim, vitae fermentum turpis elementum quis. Interdum et malesuada fames ac ante ipsum primis in faucibus.
Curabitur vel sem mi. Proin in lobortis ipsum. Aliquam rutrum tempor ex ac rutrum. Maecenas nunc nulla, placerat at eleifend in, viverra etos sem. Nam sagittis lacus metus, dignissim blandit magna euismod eget. Suspendisse a nisl lacus. Phasellus eget augue tincidunt, sollicitudin lectus sed, convallis desto. Pellentesque vitae dui lacinia, venenatis erat sit amet, fringilla felis. Nullam maximus nisi nec mi facilisis.
SHIPPING
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Morbi ut blandit risus. Donec mollis nec tellus et rutrum. Orci varius natoque penatibus et magnis dis parturient montes, nascetur ridiculus mus. Ut consequat quam a purus faucibus scelerisque. Mauris ac dui ante. Pellentesque congue porttitor tempus. Donec sodales dapibus urna sed dictum. Duis congue posuere libero, a aliquam est porta quis.
Donec ullamcorper magna enim, vitae fermentum turpis elementum quis. Interdum et malesuada fames ac ante ipsum primis in faucibus.
Curabitur vel sem mi. Proin in lobortis ipsum. Aliquam rutrum tempor ex ac rutrum. Maecenas nunc nulla, placerat at eleifend in, viverra etos sem. Nam sagittis lacus metus, dignissim blandit magna euismod eget. Suspendisse a nisl lacus. Phasellus eget augue tincidunt, sollicitudin lectus sed, convallis desto. Pellentesque vitae dui lacinia, venenatis erat sit amet, fringilla felis. Nullam maximus nisi nec mi facilisis.